L’atelier dans La Provence et récompensé par la ville
Un joli article autour de notre projet est paru dans La Provence !

Nous avons également été récompensés par l’équipe municipale de la ville de Miramas à l’occasion de l’évènement Nature en Fête. Nous avons pu faire un peu de publicité au projet SEB et à l’atelier ! La ville de Miramas nous a particulièrement soutenu via des financements de la Cité Éducative, et une vidéo devrait sortir prochainement avec les interviews de certains d’entre nous pour expliquer notre travail.

Jour J pour la mise à l’eau de SEB !
Ça y est c’est le grand jour, SEB va être mise à l’eau. Nous avons rdv à 9h au Nautic Club de Miramas, malgré le vent qui souffle un peu trop fort à notre goût… À 8h, au lycée, nous faisons les derniers préparatifs.
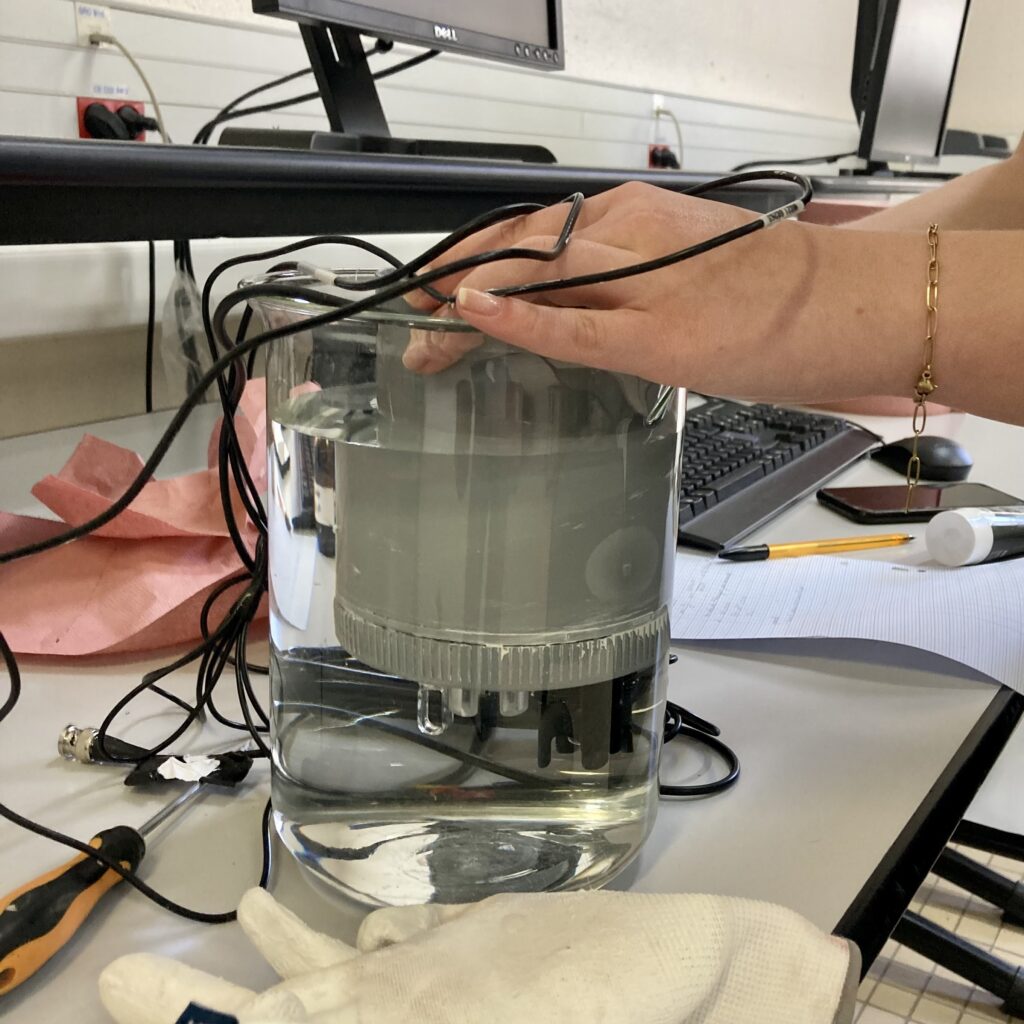
SEB fonctionne déjà depuis 2 jours, les pieds dans l’eau (dans un seau d’eau, pour être plus précis), pour que l’on soit sûr que tout marche bien (l’étanchéité, la prise et l’envoi des données en 4G…). Et tout ne marche pas bien : le conductimètre ne semble pas vouloir fonctionner, il renvoie une tension constante aux alentours de 20mV… Problème de connectique, ou de capteur ? En tous cas, nous n’avons plus le temps de le changer ou de le réparer, ce serait prendre trop de risque la veille de la mise à l’eau. Nous étudierons ça lorsque nous aurons récupéré SEB, et ferons en sorte que cela n’arrive pas pour la V2 !


Une fois sur place, les moniteurs du Nautic Club nous expliquent qu’avec le vent, nous ne pourrons pas sortir les kayaks. Mais pas d’inquiétude : nous irons sur le point de mise à l’eau en… Laser Pico ! Il s’agit d’un petit bateau biplace à voile. À l’aller, contre le vent, nous nous ferons tracter par le zodiac. Et au retour nous sortirons les voiles et rentrerons à la base grâce au vent !


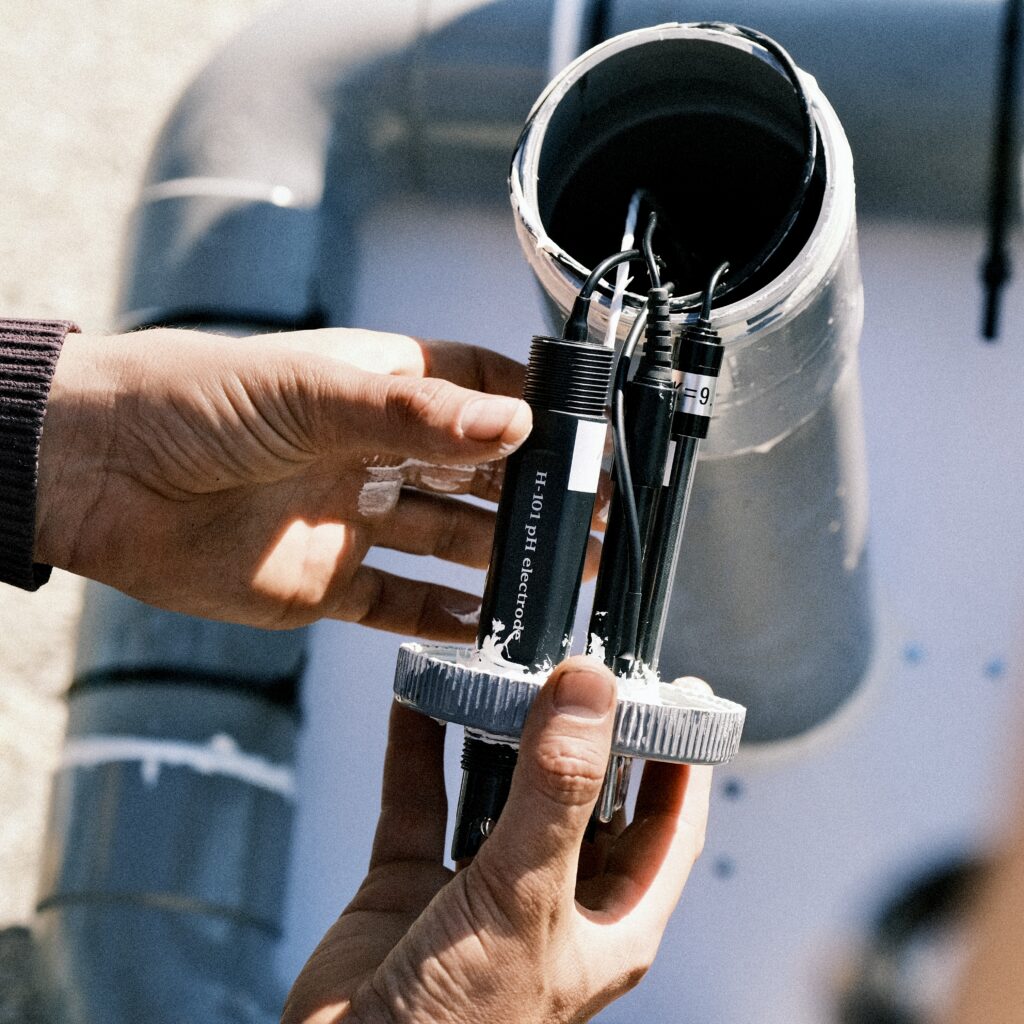
La sonde est lestée avec du sable, directement dans la colonne de mesure, pour éviter qu’elle ne se retourne. Le tout est fermé avec le bouchon / panneau solaire, et nous appliquons un tour de scotch auto-vulcanisant pour éviter qu’il ne bouge par la suite.
Tout est prêt, et nous passons au briefing, enfilage des gilets de sauvetage et préparation des embarcations !


Une dernière photo de toute l’équipe avant le départ…

Et c’est parti !


Pour l’aller, nous sommes à la queue leu leu et nous nous laissons tirer jusqu’à la zone protégée de la Poudrerie. Il y a beaucoup de vent, et il fait bien froid !

Une fois arrivés à la bouée qui nous intéresse, la sonde y est solidement attachée. L’occasion de faire une petite OLA pour fêter ça…
Au retour, c’est nous qui dirigeons nos bateaux, avec plus ou moins de succès pour certains. Sirine et Thomas arrivent bons premiers, et comme derniers… Ehm, ce n’est pas important.
Ci-dessous la sonde SEB, accrochée pour un mois à sa bouée, et Alonzo qui se sera bien amusé.


Les données produites par SEB en temps réel sont consultables sur ThingSpeak via ce lien. Nous allons d’abord pouvoir observer si les capteurs continuent de fonctionner correctement sur l’ensemble du mois, si les données restent cohérentes avec le temps, si il n’y a pas de problème de connexion etc… Et comme il y aura forcément quelques petits soucis, cela nous permettra de faire une liste des points à améliorer pour une v2 de la sonde !
Dernières retouches avant la mise à l’eau
Suite aux tests que nous avons faits dans le port de Saint Chamas, nous avons trouvés deux problèmes à régler avant une mise à l’eau définitive de notre sonde : l’étanchéité du tampon inférieur, et des interférences électriques aux niveaux des capteurs.
Le tampon inférieur a été complètement retravaillé. Nous avons imprimé en 3D un disque, avec des trous permettant de passer les capteurs. Ces trous abritent un joint torique qui va venir presser mécaniquement le capteur. Lors de l’insertion des capteurs, on applique également du mastic étanche, au cas où le joint aurait un défaut.



Ce disque est collé avec du mastic étanche directement sur le tampon, et pressé avec un étau durant le temps de séchage pour garantir qu’il n’y a pas de fuites. La séance suivante, nous avons pu tester l’étanchéité : a priori cette fois c’est bon ! Plus une goutte d’eau ne rentre, nous voilà sauvés..!
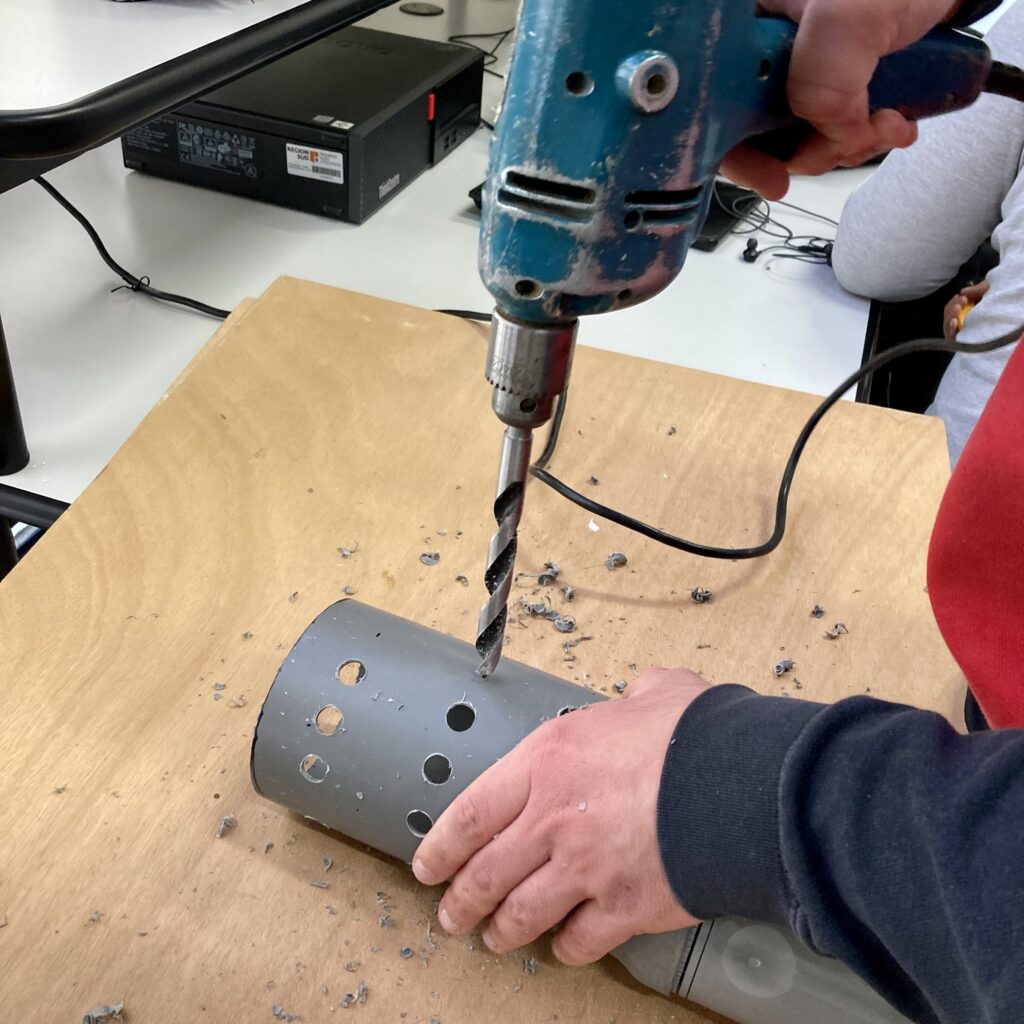
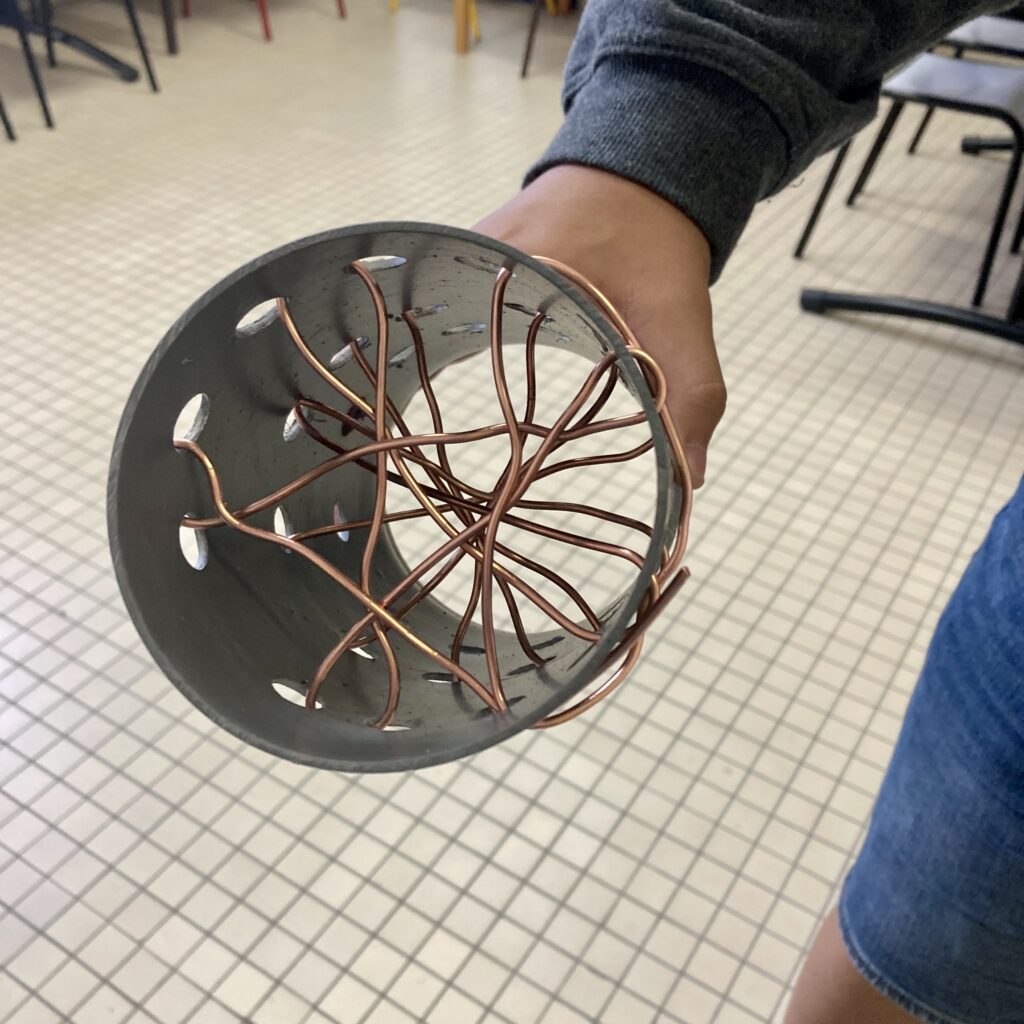
Nous avons aussi bricolé une nouvelle pièce qui servira à protéger les capteurs (contre d’éventuels frottements contre le fond, pour limiter la présence de crustacés, pour diminuer la luminosité, etc…). Il s’agit d’un tube PVC percé de trous (pour laisser l’eau passer) et avec deux étages de fils de cuivre censés empêcher les crustacés de passer. Cette protection vient se glisser autour du tampon inférieur.

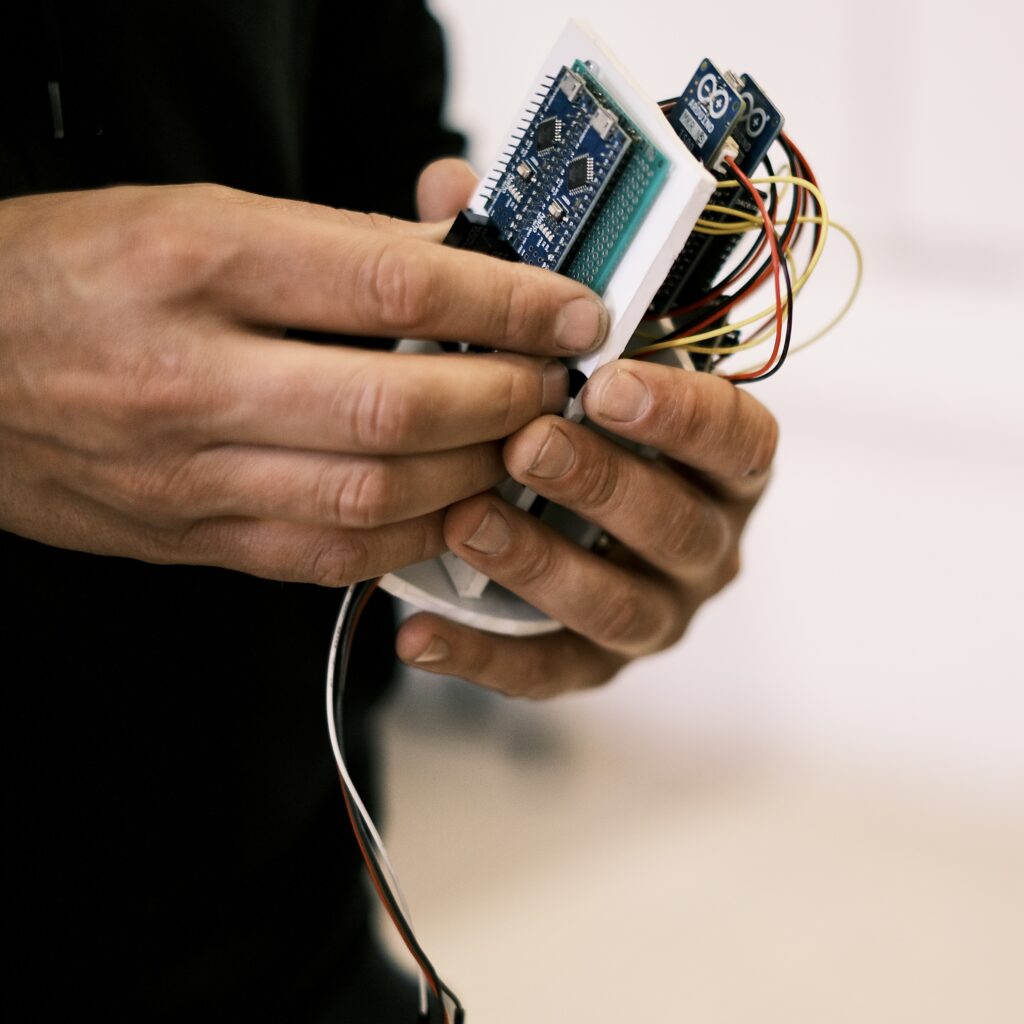
Enfin, le circuit électronique a gagné en complexité… Pour limiter les interférences entre le pH-mètre, le conductimètre et la sonde d’oxymétrie, nous avons isolé leurs alimentations. Deux Arduino Nano indépendants et isolés galvaniquement contrôlent le pH-mètre et le conductimètre. La sonde d’oxymétrie est toujours contrôlée par l’Arduino MKR « maître ». Les Nanos « esclaves » envoient leurs mesures via une liaison série à l’Arduino MKR « maître ». Ce système nous permet de garantir que les masses de chaque capteur sont bien isolées. Nous en avons aussi profité pour ajouter un moyen d’allumer/éteindre les alimentations des capteurs, ce qui nous fera gagner en économies d’énergie !
Il ne nous reste plus qu’à recalibrer tous les capteurs, et nous serons prêts pour la mise à l’eau… Enfin !
Elle est où cette fuite ?!
La pression est un peu retombée cette semaine, le rapport et la vidéo CGénial ayant été soumis, ça y est ! Maintenant nous pouvons nous consacrer pleinement à corriger les petits défauts détectés lors des tests de mise à l’eau : la fuite au niveau des capteurs, et le problème d’isolation électronique.
Le problème d’isolation devrait être réglé sous peu : nous avons ajouté deux Arduino Nano au montage, qui serviront d’alimentations « secondaires » aux capteurs et permettront de les couper lorsqu’ils ne sont pas en fonctionnement. On espère qu’ainsi, ils ne se perturberont plus mutuellement lorsqu’ils sont tous plongés dans l’eau… Nous n’en sommes comme début de cette v2 du circuit mais cela devrait vite avancer dans les prochaines semaines.


Le problème le plus urgent vient de la micro-fuite que nous avons repérée pendant les tests. Nous avons d’abord gratté le surplus de mastic autour des capteurs, pour dégager un peu leurs bases, afin d’appliquer ensuite une surcouche de résine bi-composants. Ensuite, avec une pompe, nous avons créé une dépression à l’intérieur de la colonne de mesure : on entend clairement l’air être aspiré au niveau du capteur d’oxygène dissous !! C’est donc ici que se situe la fuite…


La colle bi-composants est très liquide lors de l’application, puis durcit en quelques heures. Nous l’avons appliquée avec une seringue et un pinceau, en pompant toujours pour que la colle soit aspirée dans la fuite et vienne la combler. Après cette opération, il n’y a plus de bruit, et la colle semble avoir correctement bouché la fuite… Nous allons la laisser sécher sur le week-end et referons le test lundi ! On croise les doigts…
On a mouillé le maillot !
Aujourd’hui est un grand jour, puisque nous allons tester l’étanchéité de la sonde et le code Arduino complet, en espérant qu’elle ne coule pas !
Arrivés au port de Saint-Chamas, nous avons d’abord fait un petit pique nique tous ensemble avec les membres de l’association 8 Vies pour la planète. Après avoir pris quelques forces et profité du soleil, nous leur avons présenté notre projet, la sonde etc. Nous sommes ensuite aller poser la sonde dans l’étang et c’est Camille qui s’est chargée de la surveiller de près : elle a mouillé le maillot, dans tous les sens du terme !


La sonde flotte bien, mais le volume d’eau déplacé par la colonne de mesure est tel qu’elle se retourne assez vite. Il faudra donc lester la colonne avec des graviers pour compenser la poussée d’Archimède. Pour ce qui est de l’étanchéité, nous avons détecté une petite fuite au niveau des capteurs… Le mastic a du ne pas s’étaler correctement, et a laissé un passage pour l’eau. Nous mettrons une surcouche de colle epoxy la semaine prochaine, très liquide avant de sécher, et qui comblera donc (on espère) cette fuite.
Après ces tests, nous avons compilé le code Arduino complet (en ligne dans la partie Ressources du site). L’enregistrement sur carte SD marche, et les données sont correctement envoyées par 4G au serveur ThingSpeak ! Mais nous avons encore détecté un problème : lorsqu’elles sont mises à l’eau simultanément, les sondes pH-métrie et conductimétrie semblent interférer entre elles…


Nous pensons que les électrodes de ces deux capteurs, qui directement au contact de l’eau, perturbent les mesures voisines. Il va donc falloir imaginer un circuit électronique plus complexe, avec la possibilité de couper successivement les alimentions des sondes. Ainsi, on allume le conductimètre, on fait la mesure, on l’éteint, on allume le pH-mètre, on fait la mesure, on l’éteint, etc. Les sondes ne seront plus mutuellement perturbées, et nous gagnerons en économie d’énergie.

Pas de problème détecté sur la partie Alimentation : le panneau solaire fonctionne, la batterie se charge, et l’ensemble alimente bien notre Arduino NB1500 : ouf ! Nous avons donc deux problèmes à régler dans l’immédiat, et c’est ce qui va occuper nos prochaines séances, pour être près au plus vite pour une mise à l’eau.
– Jihane, pour le labo Cocteau (avec des photos de Sirine, cette fois !)
Bientôt la mise à l’eau…
Les dernières séances ont vu les choses s’accélérer. Nous devons rendre notre rapport pour le concours CGénial le 26 mars, et il faut donc faire nos premiers tests dans l’étang d’ici là ! Et écrire le rapport, et tourner une vidéo…



Nous avons fini la fixation entre la colonne de mesure et la plateforme de la bouée. 4 équerres en aluminium, que nous avons percées et vissées à la plateforme et à la colonne, maintiennent l’ensemble. Nous avons ensuite étanchéifié la bouée avec du mastic, au cas où la colle PVC ne ferait pas une couche homogène et laisserait passer l’eau.



Nous avons aussi inséré les capteurs dans le bouchon inférieur de la colonne, et étanchéifié le tout avec du mastic. Le bouchon supérieur doit accueillir le panneau solaire, et nous l’avons donc collé à une plaque PVC elle-même vissée au panneau solaire.



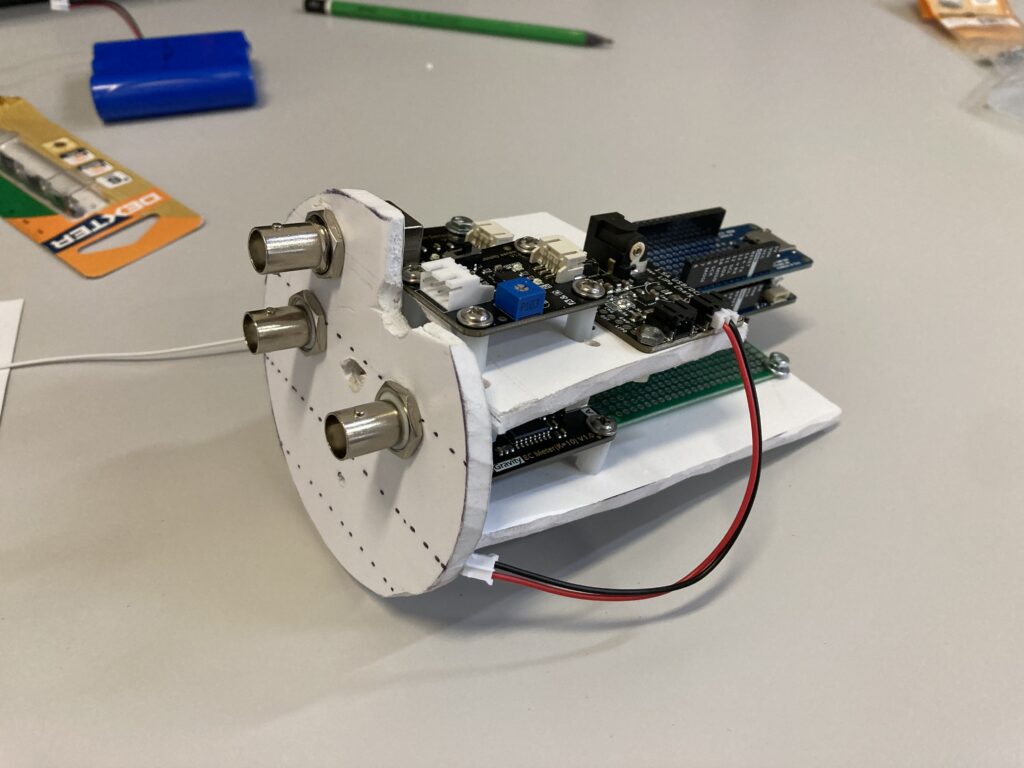
Le « cerveau » de la sonde, Arduino et les petites cartes électroniques des capteurs, ont été fixées sur des plaquettes PVC montées sur un disque percé pour accueillir les prises des câbles. Le tout doit être glissé au sommet de la colonne de mesure.


Un dernier étalonnage des capteurs, pour réajuster encore quelques les paramètres… Cette fois-ci sous l’œil des caméras, pour notre vidéo que l’on enverra pour le concours.




L’atelier s’est transformé en plateau de tournage, et on termine la sonde en même temps qu’on filme et interview. Il faut finir d’étanchéifier l’extérieur de la sonde (les trous accueillant les vis, surtout), et rallonger le fil du panneau solaire pour qu’on puisse fermer la colonne de mesure sans difficulté.


On espère un premier test dans le port de Saint Chamas dans quelques jours, pour vérifier l’étanchéité de la sonde et prendre nos premières « vraies » mesures ! Normalement, tout est vissé/collé, tout est calibré, soudé… On croise les doigts pour que SEB ne finisse pas au fond de l’étang, mais ça devrait le faire !
– Jihane, pour le labo Cocteau
Dernière séance calibrage (on espère !)
Aujourd’hui nouvelle séance de calibrage, pour terminer les sondes que nous n’avions pas pu calibrer la séance précédente, et vérifier les autres.
Calibrer une sonde, cela revient à mesurer la tension V aux bornes de la sonde tout en faisant varier le paramètre d’intérêt. Par exemple, pour la sonde pH-métrie, on utilise plusieurs solutions de pH connu et on mesure la tension aux bornes du pH-mètre pour chaque valeur de pH. On construit ensuite la courbe pH=f(V), caractéristique de la sonde. Il est très important de le faire pour chaque sonde, car d’une sonde à l’autre cette courbe peut changer, même si le principe de fonctionnement reste le même !
Une fois la courbe de calibrage obtenue, on fait une régression (souvent linéaire, mais pas toujours) pour trouver le modèle théorique de la courbe expérimentale. Enfin, avec l’aide du modèle théorique, on pourra mesurer n’importe quelle tension V et la traduire dans la valeur du paramètre que l’on souhaite mesurer.


La séance s’est dans l’ensemble bien passée, à part pour la sonde de turbidité qui semble montrer quelques limites de précision… À vérifier à la rentrée. Toutes les autres sondes sont calibrées, et prêtes à être programmées !

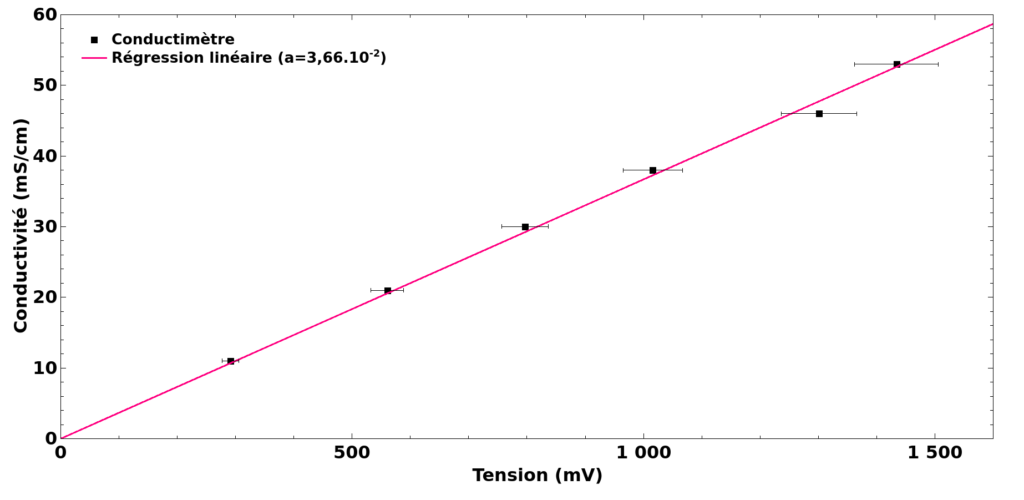
Exemples des courbes obtenues pour les sondes de pH-métrie et de conductimétrie :
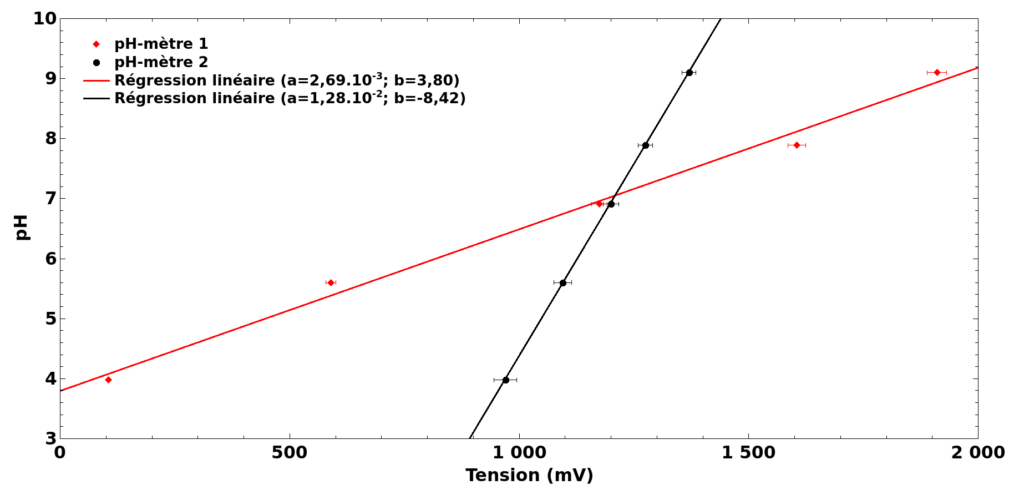
Pour les deux pH-mètres que nous possédons, les courbes sont très différentes, d’où l’importance de cette étape de calibrage !
C’est maintenant les vacances, et les choses devraient encore s’accélérer à la rentrée : programmation Arduino, et montage de la sonde.
– Jihane, pour le labo Cocteau
Encore du bricolage 🙂
La sonde prend peu à peu forme, et on travaille sur différentes choses en même temps.
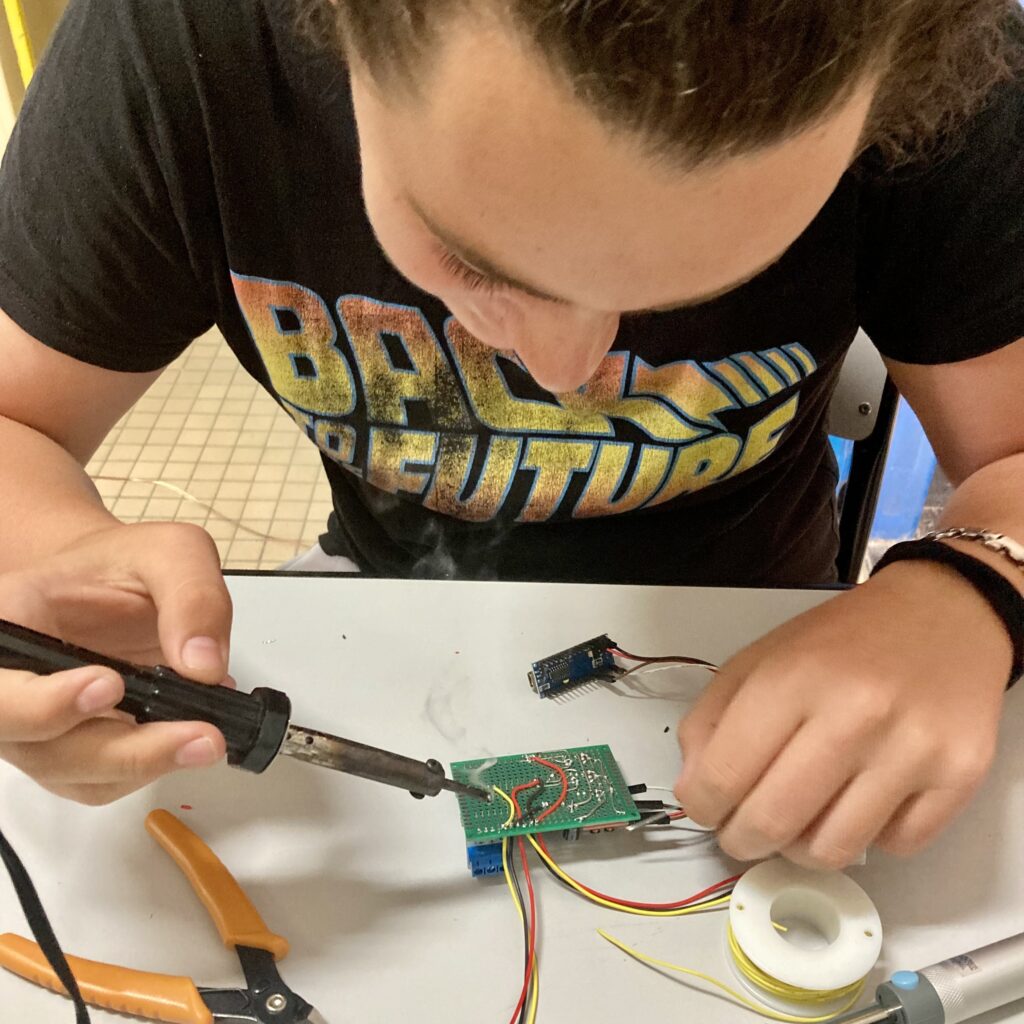
Certains fils sont à rallonger, car les capteurs seront plongés sous l’eau et ils sont trop courts (20 cm !). D’autres sont déjà à réparer, comme celui du capteur conductimétrie qui a un faux contact… Un groupe s’occupe donc de ça sur la séance.


Pendant ce temps, il faut continuer de monter le corps de la sonde. On perce des trous dans la plaque qui soutient la colonne, pour l’attacher plus tard à la bouée, et dans le bouchon de la colonne pour accueillir les capteurs.


On n’a pas encore choisi comment faire l’étanchéité du bouchon une fois que les capteurs le traverseront : silicone ? colle ? Mais il faudra vite se décider car ça y est, il est percé…



On commence la soudure de la « carte mère » qui accueillera notre carte Arduino, les composants et les branchements des capteurs. On soude des « headers » sur une « plaque de prototypage » : Arduino viendra se brancher directement dessus, et deviendra plus facile à ajouter/retirer sans avoir à souder/dessouder.
La « mini » sonde SEB, qui sera complètement sous l’eau, avance aussi. Le groupe qui s’en charge est en plein collage de la structure avec des tuyaux PVC.


Voilà, c’est tout pour aujourd’hui ! La prochaine séance sera consacrée au calibrage des sondes : calibrer celles que nous n’avions pas eu le temps de calibrer la dernière fois, et vérifier le calibrage des autres après 2 mois… Rdv en salle de TP !
– Jihane, pour le labo Cocteau
La sonde prend forme !
L’étape calibrage des capteurs est un peu mise de côté sur les dernières séances, car on attend des produits chimiques, pour se concentrer sur la fabrication de la sonde. Damien et Guillaume, de 8 Vies pour la planète, sont venus nous prêter main forte.
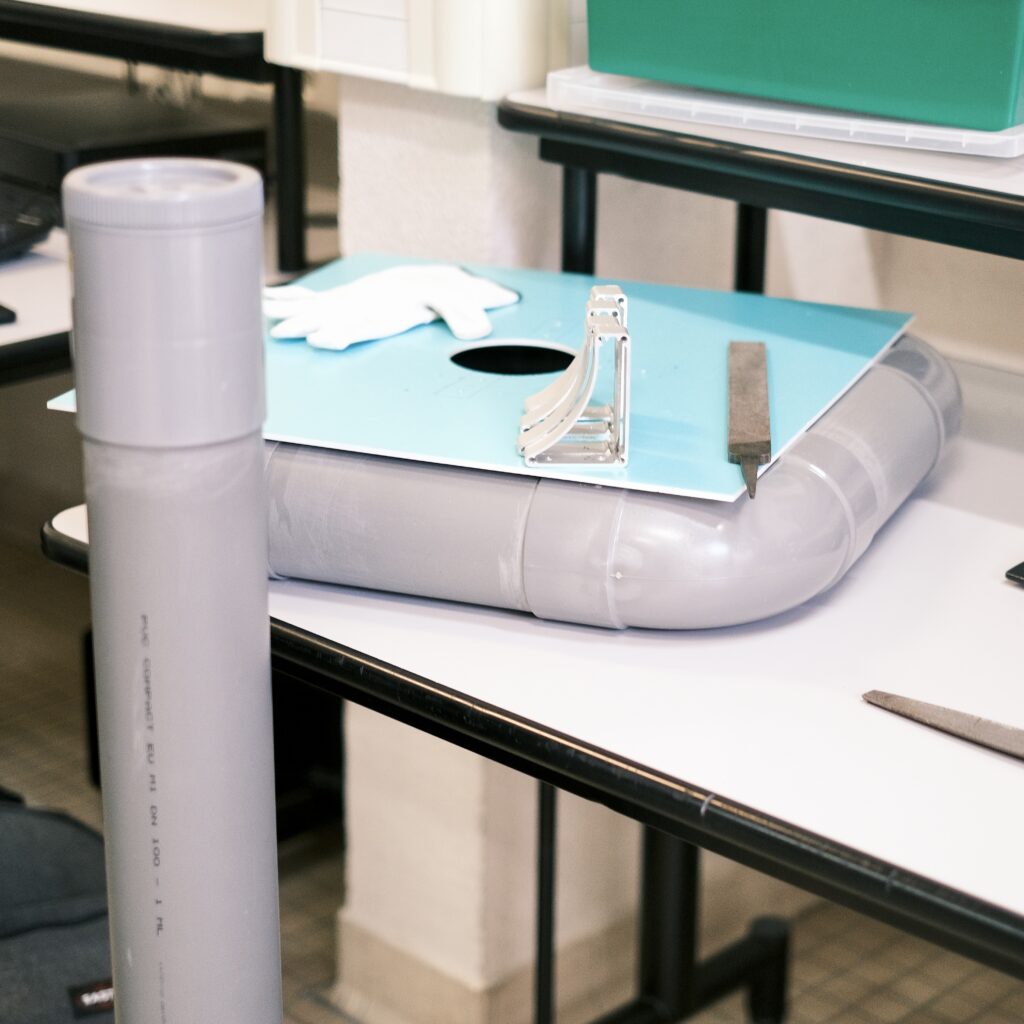
1ère étape : la fabrication de la bouée, qui va maintenir l’électronique hors de l’eau et supporter la sonde. On a fabriqué une bouée carrée, de 50cm de côté, à partir de 4 tubes en PVC de 30cm de long et 100mm de diamètre, et de 4 coudes droit. La difficulté vient de la colle PVC, qui prend quasiment immédiatement : il faut faire attention à bien emboiter les tubes sur une surface plane. Avant le collage, il a fallu poncer les tubes et les coudes (voir post précédent !) et les nettoyer à l’acétone. Aujourd’hui, après le nettoyage, on monte la bouée sans colle, pour tout vérifier, on démonte, on enduit chaque face de colle et on remonte. (Presque) trop facile… EHM !




La bouée n’est pas parfaite après collage, et possède un petit angle : tout emboiter simultanément était un peu compliqué. Il faudra penser à combler les espaces avec du silicone avant la mise à l’eau.
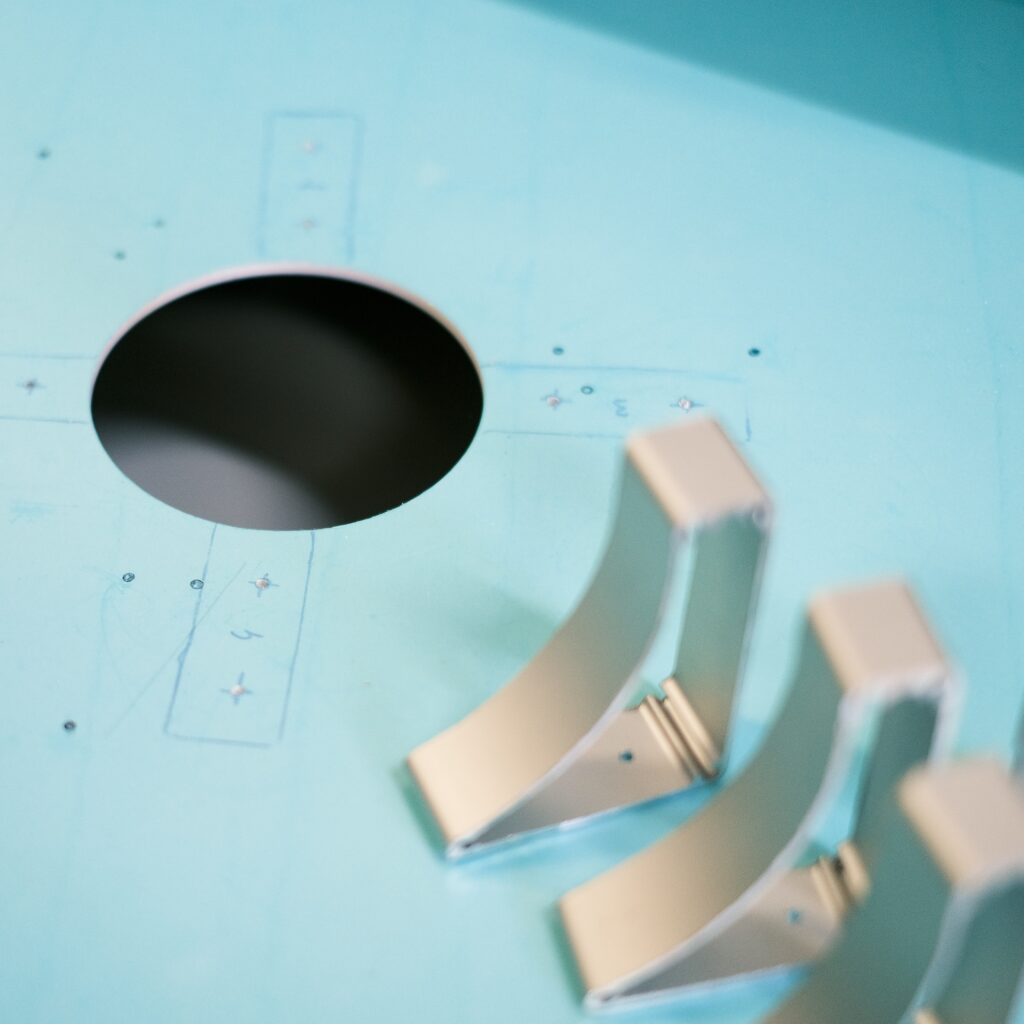
2ème étape : après la bouée, la plateforme. C’est une plaque de 50cm de côté en PVC extrudé, avec 4mm d’épaisseur. Elle est trouée au centre pour laisser passer un tuyau PVC 100mm, qui amènera les capteurs sous l’eau. Il va falloir percer des trous un peu partout : sur les bords, pour passer des serflex et attacher la plateforme à la bouée, autour du trou central pour visser des équerres qui viendront maintenir la colonne capteurs, sur la tête de la colonne pour laisser passer les capteurs…



Enfin, il a fallu aussi bricoler un peu la partie « câbles » du projet : rallonger les fils du capteur turbidité, qui font 20cm et donc beaucoup trop courts, et réparer le connecteur du conductimètre qui avait un faux contact (déjà ..!) Adam et Damien s’en sont chargés.

On continue la fabrication pour quelques séances, puis il faudra finir le calibrage et coder notre Arduino !
– Jihane, pour le labo Cocteau
Calibrage, calibrage, et… Ponçage
Aujourd’hui, une séance calibrage pour les capteurs pH, conductimétrie et température. Il faudra le refaire plusieurs fois, pour vérifier qu’il n’y a pas de dérive avec le temps.


Pour calibrer une sonde, il faut mesurer avec un appareil commercial ou calculer théoriquement la grandeur physique d’intérêt G (ici le pH, la conductivité, et la température) et la comparer à la tension V mesurée en sortie de la sonde à calibrer. La courbe G=f(V) obtenue doit être ajustée : c’est ce qui s’appelle une régression (et elle n’est pas forcément linéaire !). L’équation de la courbe permettra ensuite de convertir n’importe quelle tension mesurée au cours des expériences en la valeur physique qui nous intéresse. Les résultats de cette première séance feront l’objet d’un futur post quand on les aura analysés !


La fabrication a elle aussi commencée. Et pour coller des tubes PVC entre eux (ils vont constituer le corps de la sonde) il faut d’abord les poncer au papier de verre, et les biseauter au cutter. C’était la mission de Lucas et d’Alonzo aujourd’hui, et ils s’en sont plutôt bien sortis (même s’ils ont mis de la poussière de partout sur la paillasse…). Après les avoir nettoyés à l’acétone, on pourra les coller entre eux à la colle PVC, pour monter la bouée !
– Jihane, pour le labo Cocteau